MIRA
A real-time autonomous navigation pipeline fusing computer vision, depth estimation, and five proximity sensors on a Raspberry Pi + Hailo-8L NPU.
mira-site-three.vercel.appMIRA
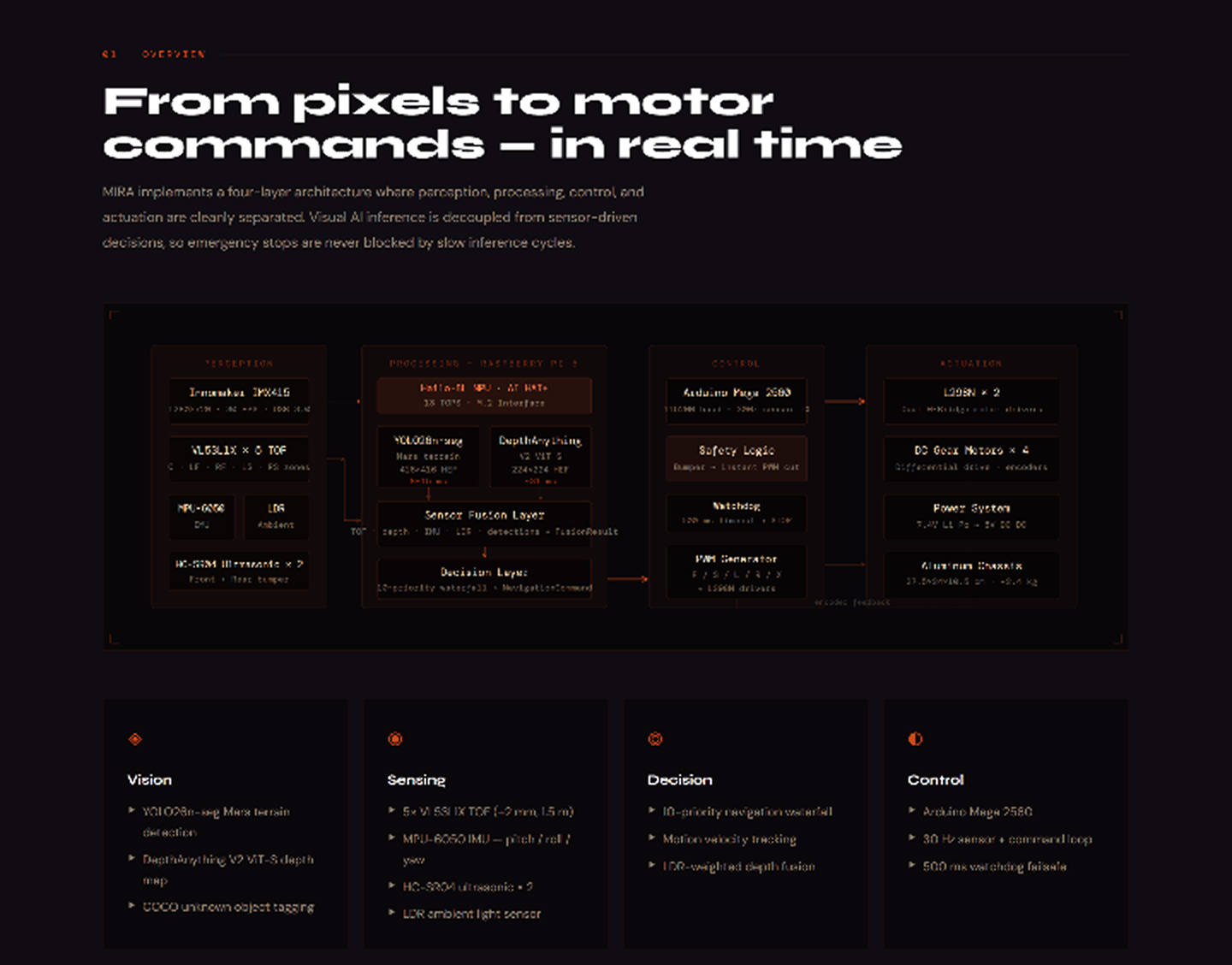
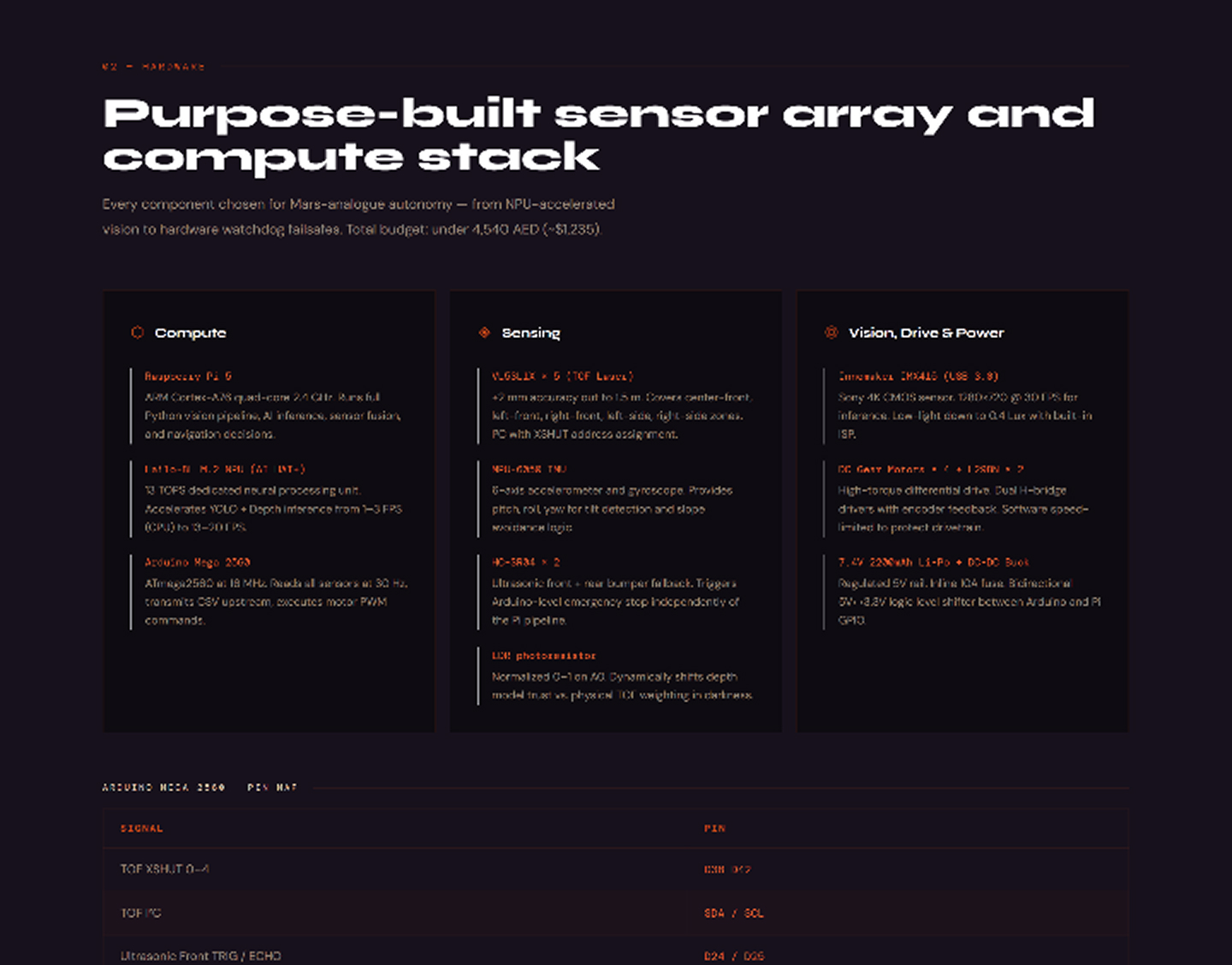
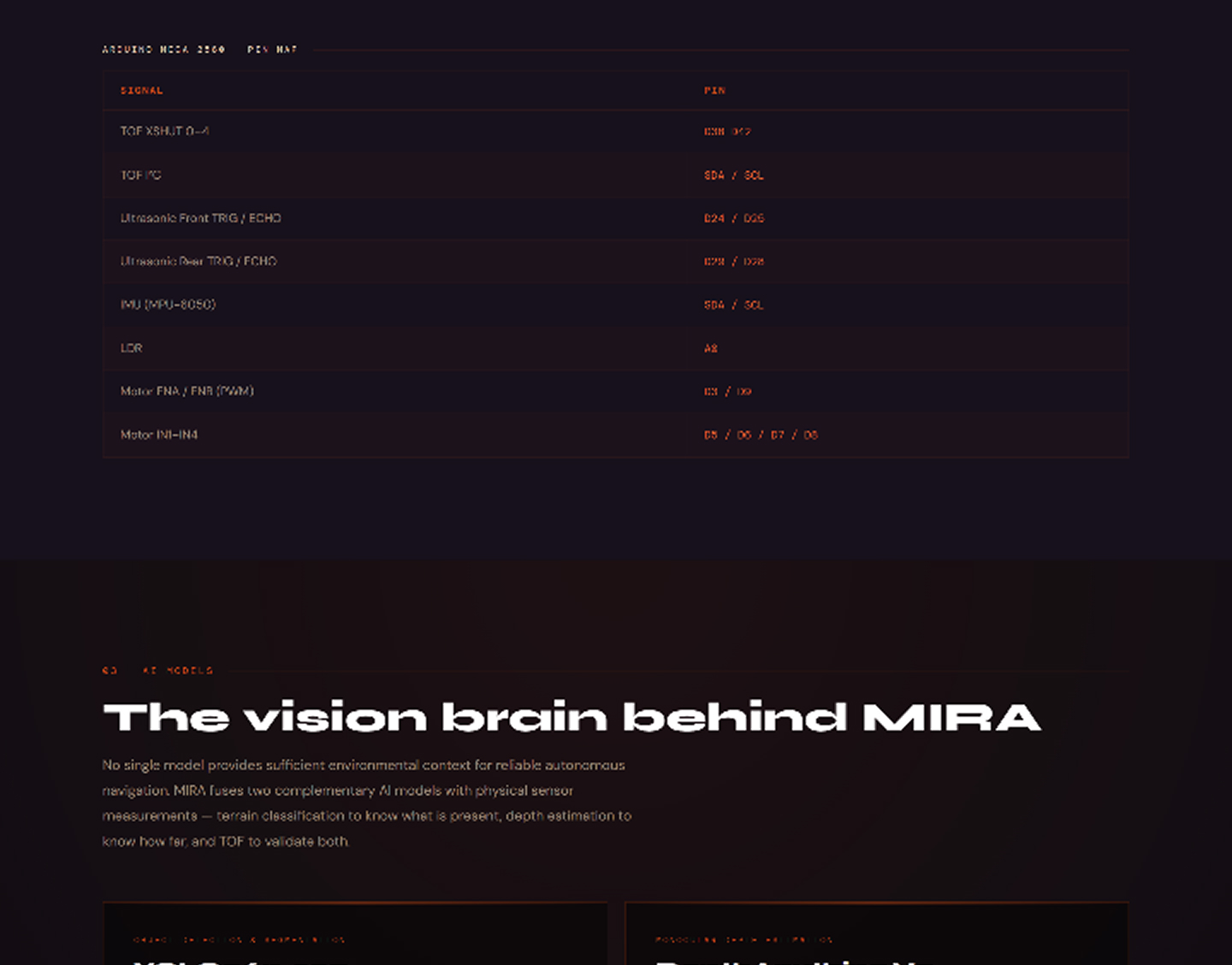
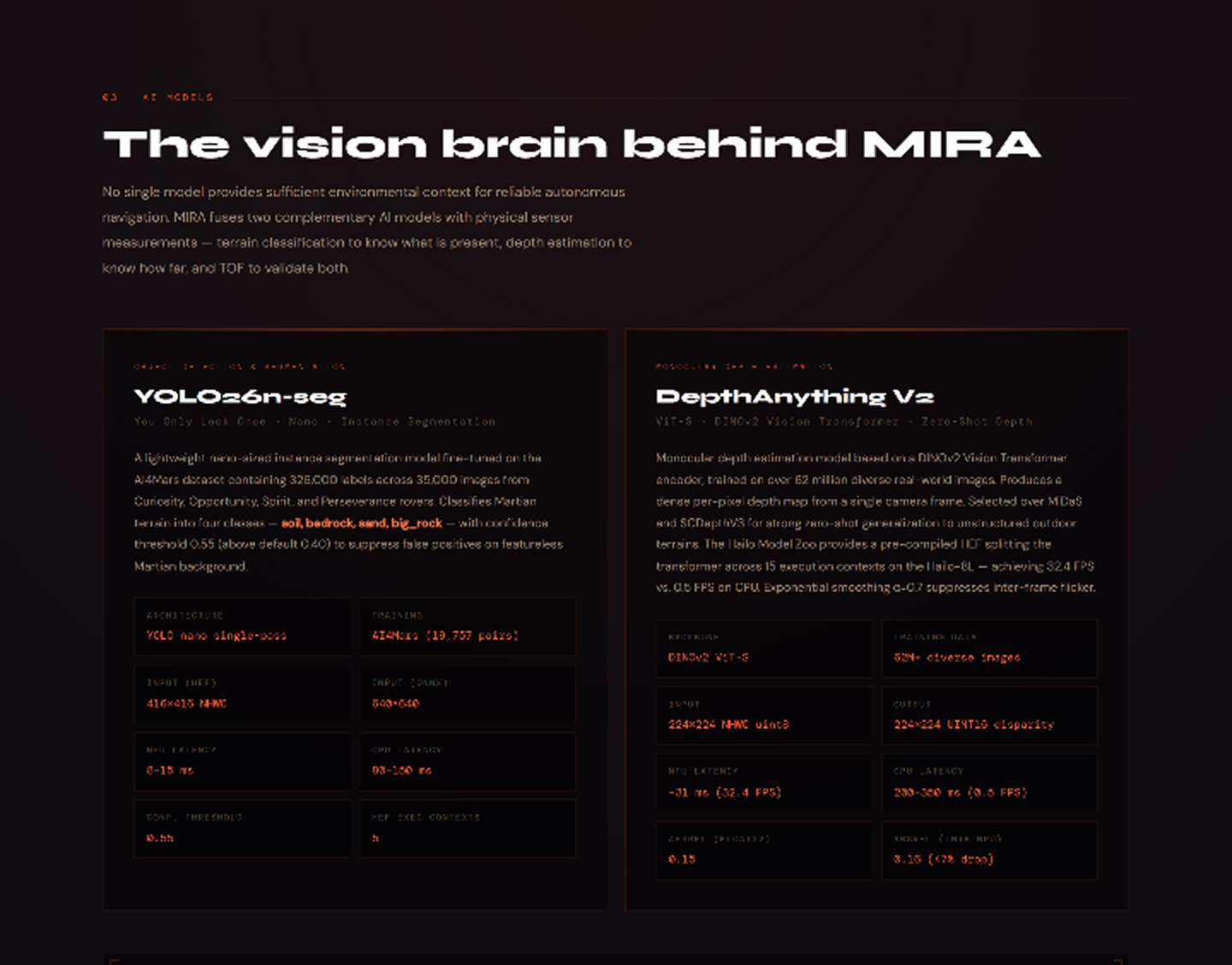
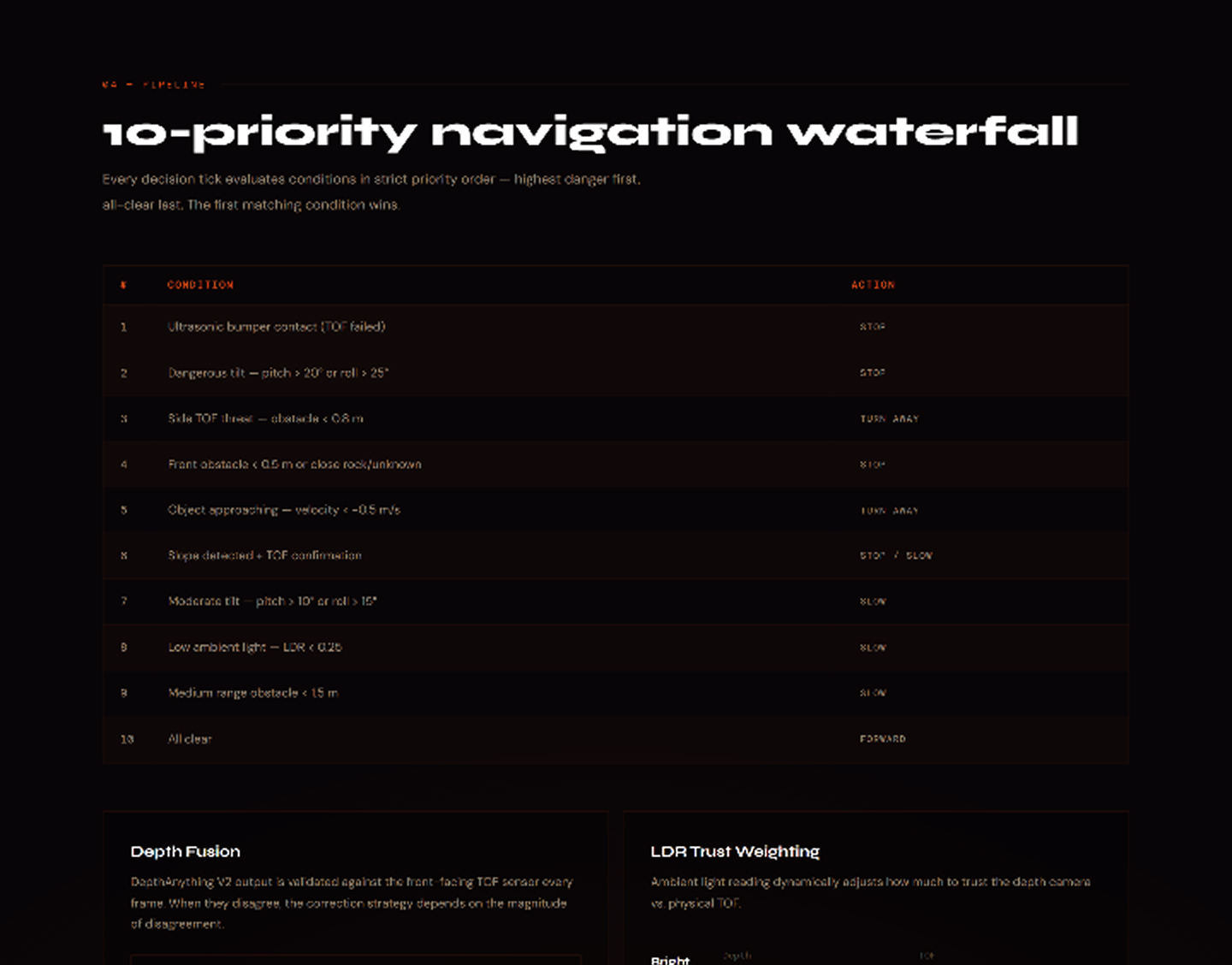
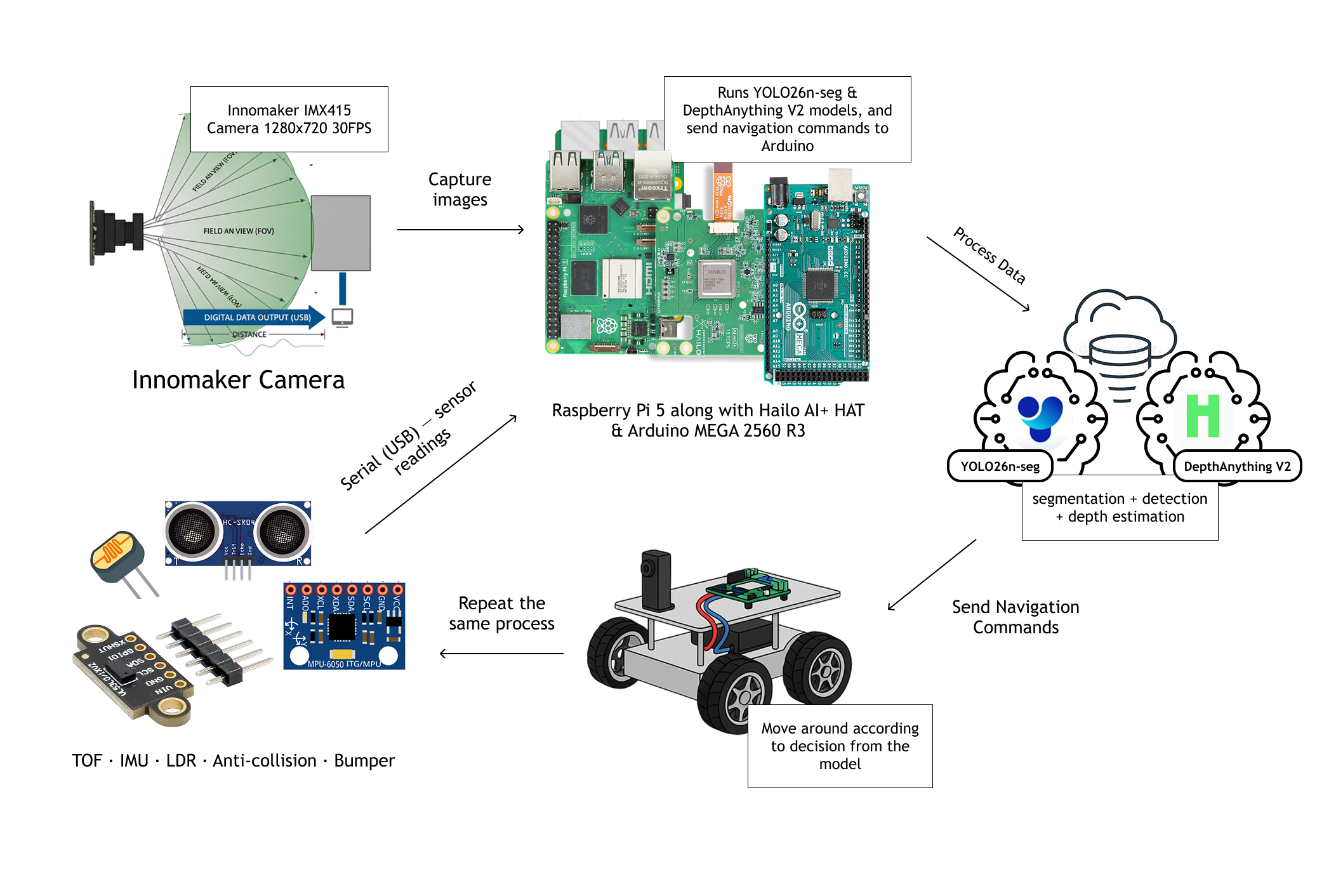
MIRA (Mars Intelligent Rover Autonomy) is an autonomous vision and navigation system built for a physical rover running on a Raspberry Pi paired with a Hailo-8L neural processing unit and an Arduino Mega for hardware control. The pipeline fuses data from a camera, five time-of-flight sensors, an IMU, an LDR, and two ultrasonic bumpers to make real-time navigation decisions. Custom-trained YOLO models classify Mars terrain (soil, bedrock, sand, rock) while DepthAnything V2 estimates proximity — both running on the NPU, with automatic ONNX CPU fallback when the NPU is unavailable. A 10-priority navigation waterfall processes all sensor fusion data and issues motor commands to the Arduino at 30Hz.